NAVIS
3D激光自主导航平台

超大3D建图面积

激光雷达融合多传感器

导航模式

最大移动导航速度
精准定位

以上运动模式
NAVIS实现自主导航
NAVIS是专为半封闭和全封闭场景设计全新移动机器人导航方案。搭载激光雷达、深度相机和IMU传感器,实现精准感知及实时场景构建,具有卓越环境适应能力和高稳定性。NAVIS Brain与NAVIS Bridge共同打造集成数据处理与管理平台,支持数据可视化、场景地图构建与管理等功能。搭载多平台智能交互NAVIS Board系统,提供便捷操作界面,简化导航过程。


多传感器融合
搭载激光雷达、深度相机、IMU、RTK等传感器,实现路径规划、自主避障、高精度定位和导航

全面兼容
支持全系列松灵机器人轮式底盘、履带型底盘、四驱四转

感知决策一体化
移动机器人具备了智能感知和决策能力,使其能够实现自主导航、规划路径、自主避障,更好地应对复杂的环境挑战。
适配多款底盘
覆盖全地形场景应用

HUNTER2
阿克曼转向 150KG负载 常规公路路边

BUNKER
履带式差速自转 克里斯蒂悬挂 户外越障、爬坡

SCOUT2.0
四轮差速自转 独立悬挂 户外越障、爬坡

RANGER MINI
全向四轮驱动 四种运动方式 狭小和不规则空间
应用场景
SCOUT 2.0 采用双横臂独立悬架,平衡稳定抗干扰,并配置400W无刷伺服电机,动力强劲,能广泛应用在环境监测、农业采摘、移动抓取、电力巡检等场景。




技术参数

尺寸
720mm*500mm*345mm
轴距
494mm
轮距
364mm
整备质量
75kg
最高速度
7.2km/h
最小转弯半径
0m (自旋模式)
驱动形式
轮毂电机
工作温度
-20~45°
充电器
54.75V20A
充电时间
1.5h
电压
48V
动力电池类型
磷酸铁鲤
轮毂半径
100mm
对外供电
48V
额定运动载重
100KG
最大爬坡度
15°(带负载)
转向形式
四轮四转
悬挂形式
前摆臂后独立悬挂
最大行程
35KM
最大续航时间
7~8h
电机参数
转向 100W×4;双编谐波关节电机 动力电机 350W×4 编码器轮毂电机
码盘参数
1024线
通信接口
标准CAN

ROS教育套装 开拓科创教育新途径

ROS教育套装 开拓科创教育新途径
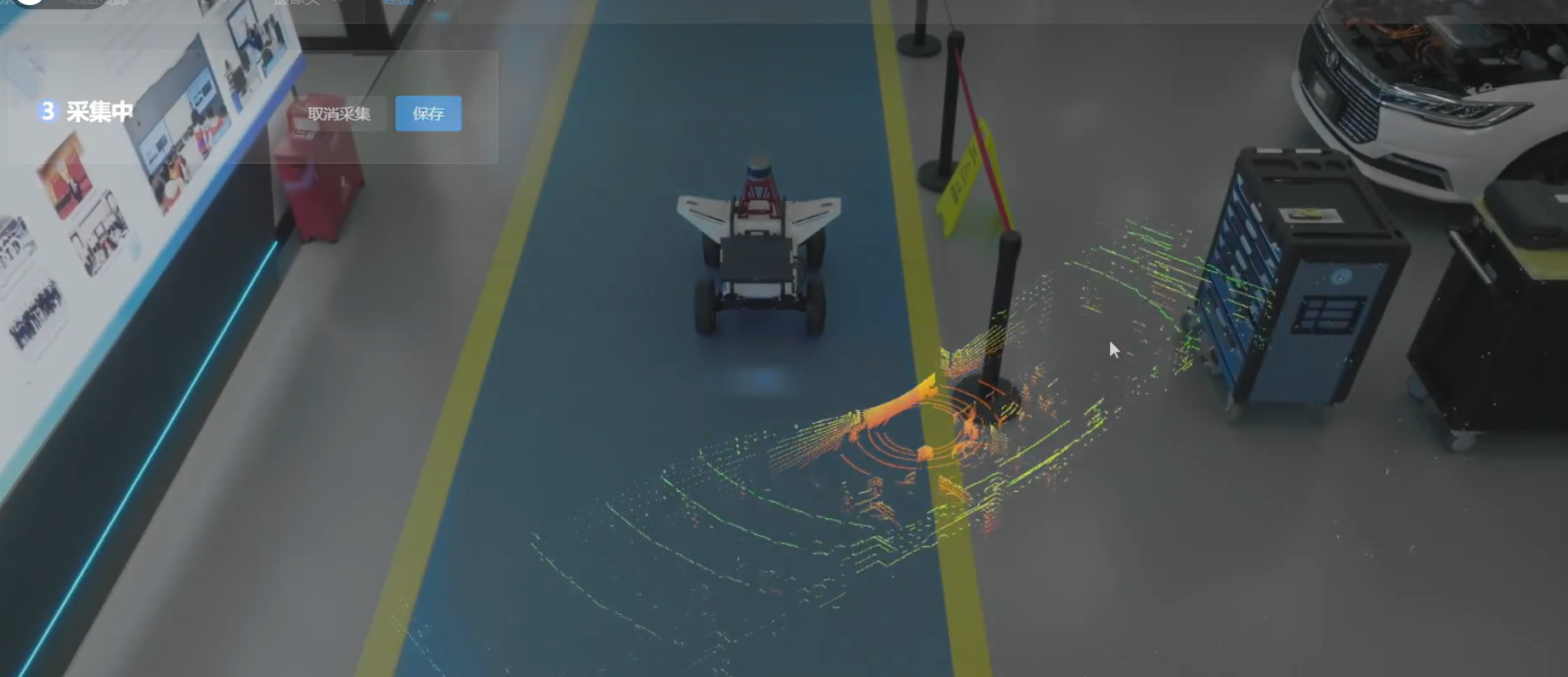
NAVIS-3D激光自主导航平台

松灵智能配送方案:Ranger Mini 2.0与NAVIS自主导航技术协作联动

松灵智能运输方案:Titan搭载NAVIS导航平台,解放双手的高效运输

