以ROS2 Foxy核心,支持全新特性
以ROS2 Foxy版本为核心,搭载了 高精度LiDAR、IMU、深度双目相机等传感器,工控机采用X86架构,并基于 Ubuntu20.04 系统提供包含Nav2、Gazebo11等新特性,以 Nav2 为核心的导航组件全面兼容NAV2官方新特性,为科研教育提供一个全面深入的 ROS2 学习研究探索综合机器人开发平台。


内置应用案例,详细开发文档
ROS2 NAV Kit为您提供内置应用案例和详细的开发文档,让您轻松上手ROS2开发。从入门到进阶,我们提供完善的教程和示例代码,让您深入了解机器人运动控制、通讯、导航、地图构建等应用。
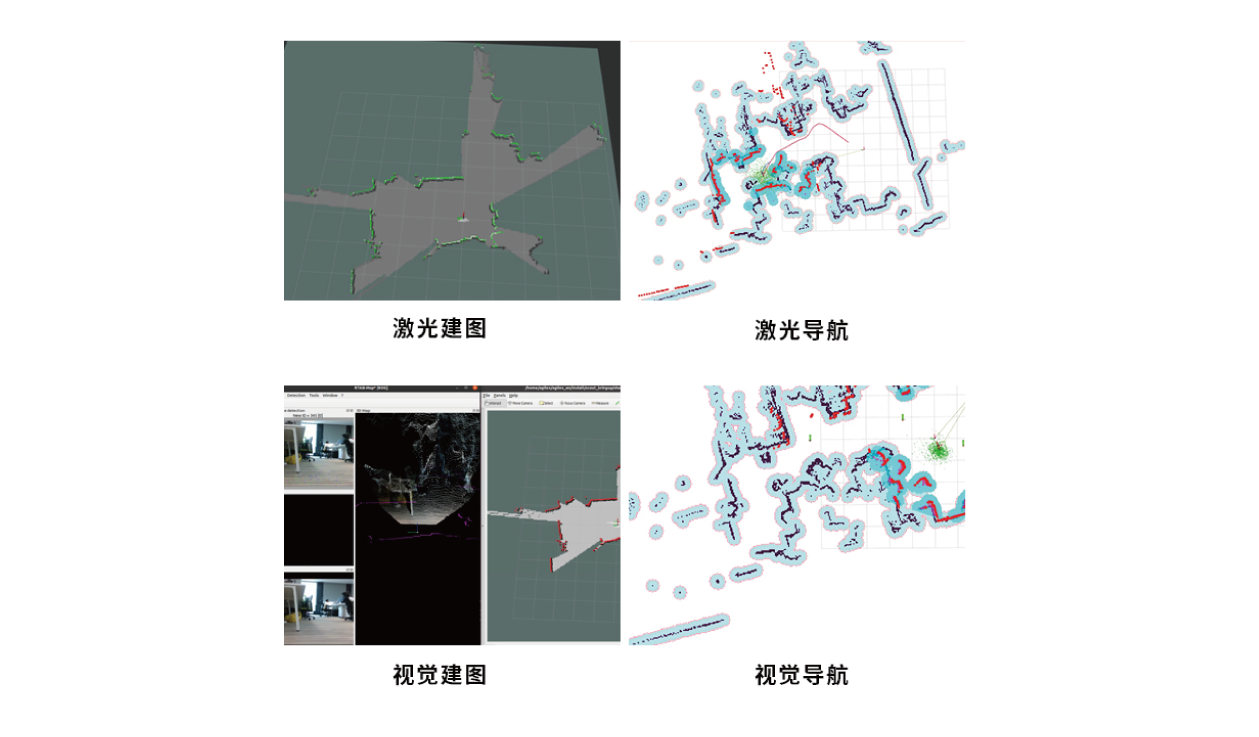
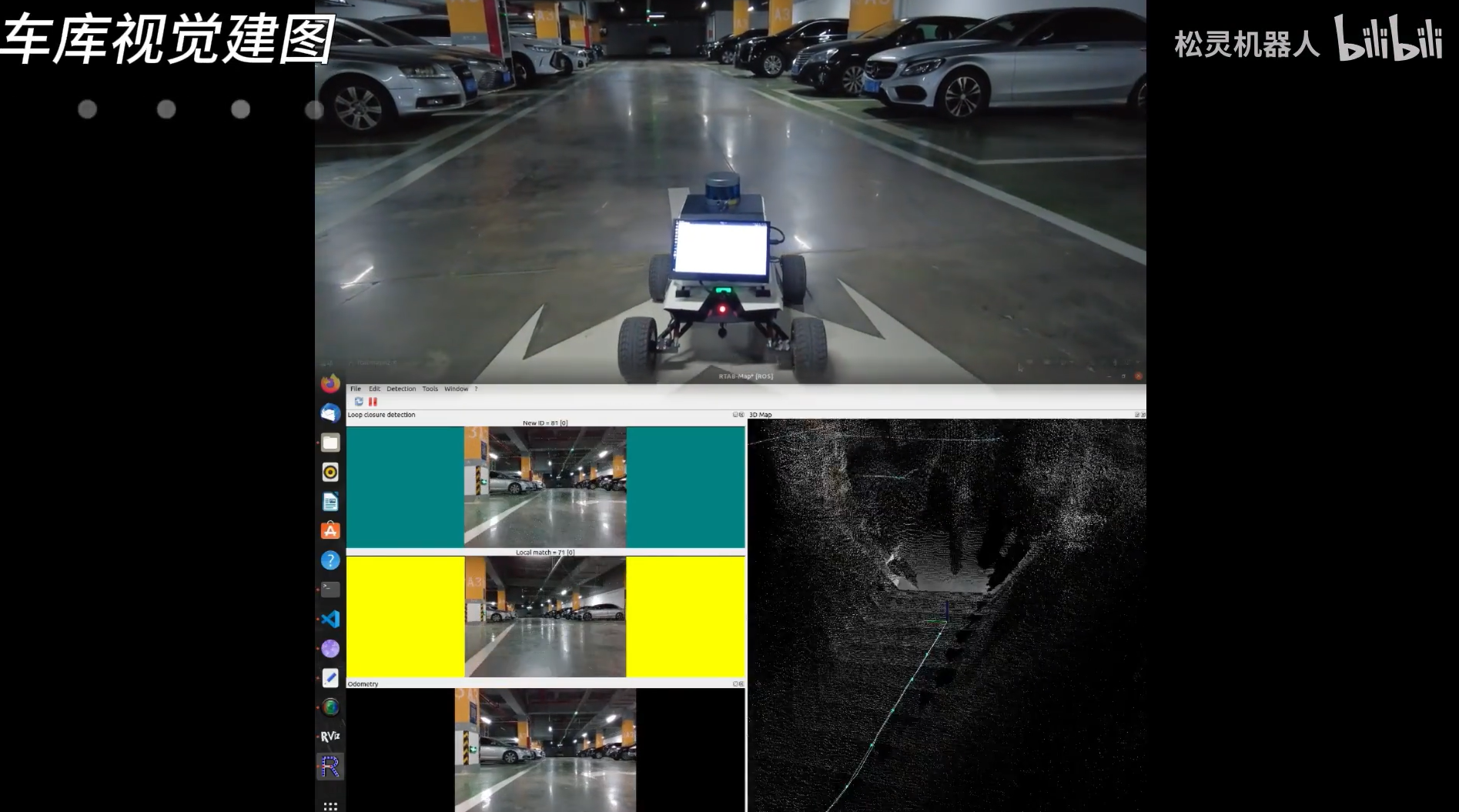
高精度定位导航,自主识别避障
ROS2 NAV Kit的高精度定位导航功能让机器人轻松定位自身位置,实现准确导航。并通过高精度LiDAR和多传感器的协同工作,机器人能够智能感知周围环境,及时发现障碍物,并优雅地规避,确保安全通行。这使得机器人在复杂环境下自信地导航,为您的学习和研究提供可靠的保障。
技术参数
尺寸(长x宽x高)
612mm*580mm*245mm
轴距
451mm
轮距
490mm
整备质量
23KG
最小离地间隙
115mm
最小转弯半径
0m(可原地自旋)
最高速度
3m/s(公路轮) 3m/s(麦克纳姆轮)
额定行进载重
10kg(公路轮) 20kg(麦克纳姆轮)
爬坡角度
<30° 带负载
越障能力
70mm
驱动形式
四轮四驱
最大里程
10KM(空载)
工作温度
-10~45摄氏度
充电器
AC 220V独立充电器
充电时间
2H
对外供电
24V
对外供电
24V
码盘参数
霍尔编码器
通信接口
标准CAN
通信接口
标准CAN 232串口
防护等级
IP22
悬挂方式
摇摆臂独立悬挂