一站式线控底盘+无人系统开发套件
AutoKit是一套基于Autoware开源框架的无人驾驶开发套件,它提供了强大的自动驾驶传感器套件,能与松灵机器人多款高性能机器人底盘无缝集成,适用于所有驾驶环境的自主功能研发,包括城市道路和户外越野环境;基于开源ROS,AutoKit极大降低入门门槛,帮助学术教育和行业应用开发人员,在多行业领域快速部署自动驾驶功能和应用的开发,构建和验证自动驾驶功能算法,节约研发成本,推动无人驾驶的研发进程。
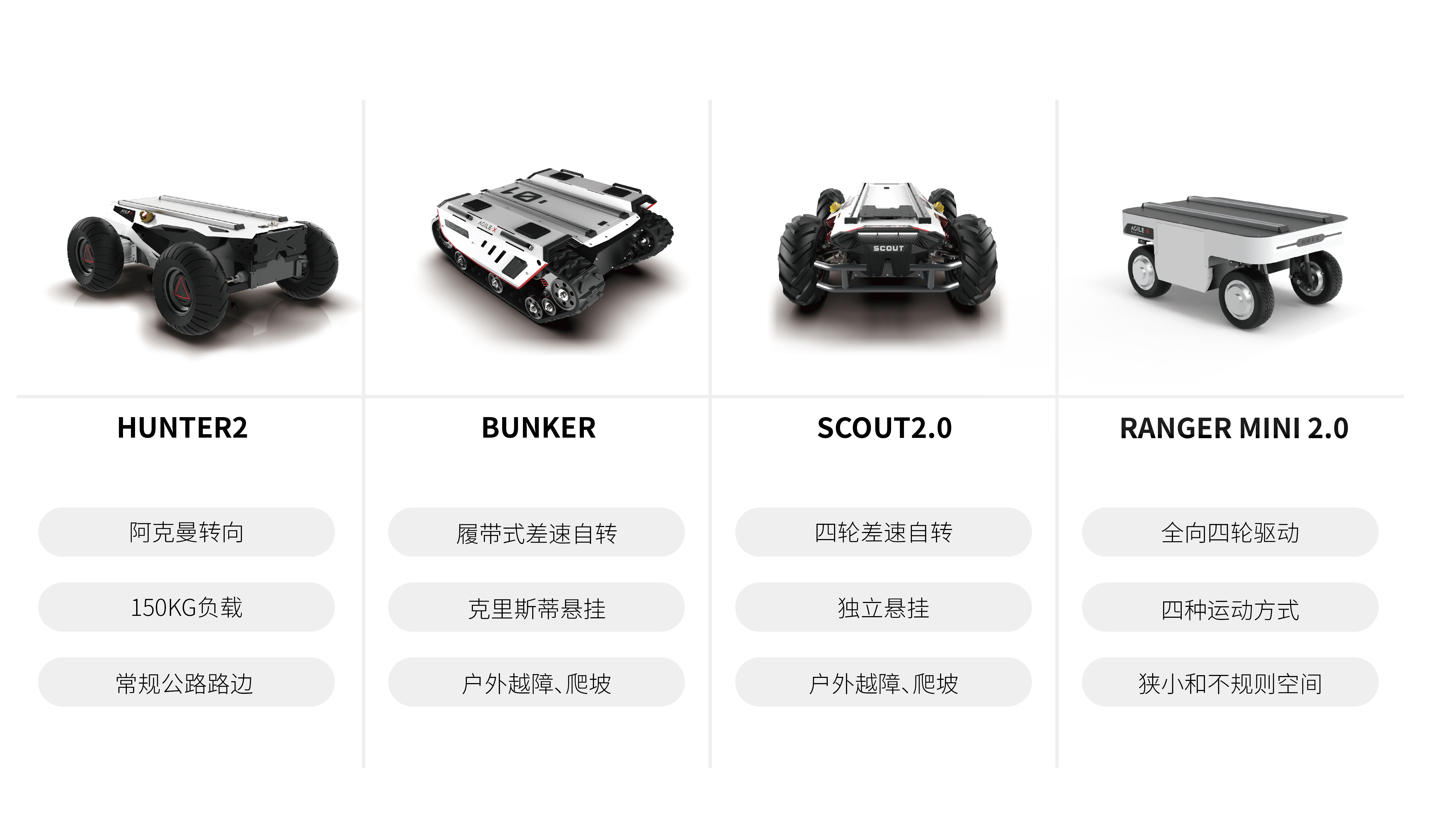
适配多款底盘,覆盖全地形场景应用
深入应用场景,匹配客户需求,打造极高可靠性

快速启动自动驾驶功能研发
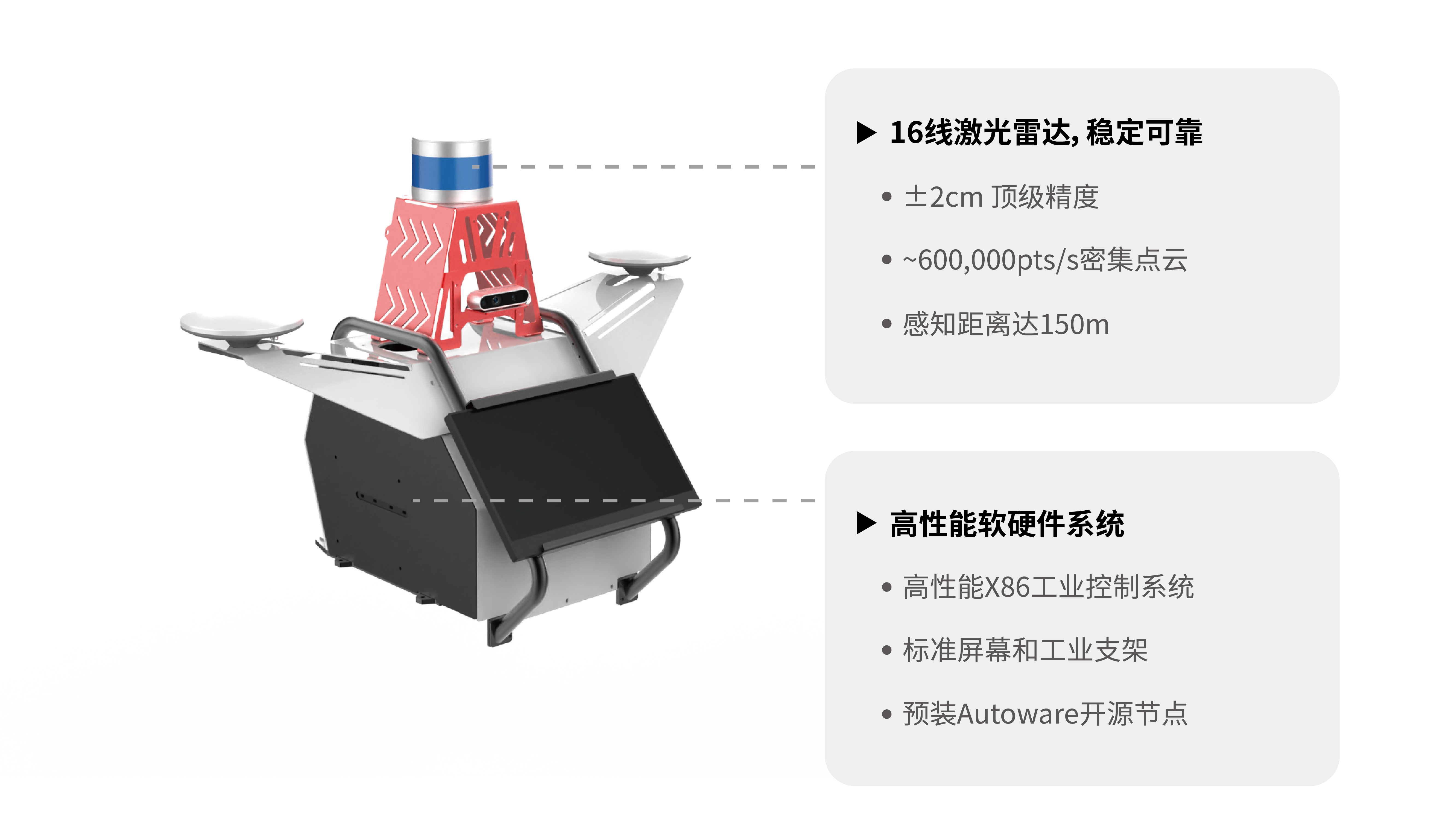
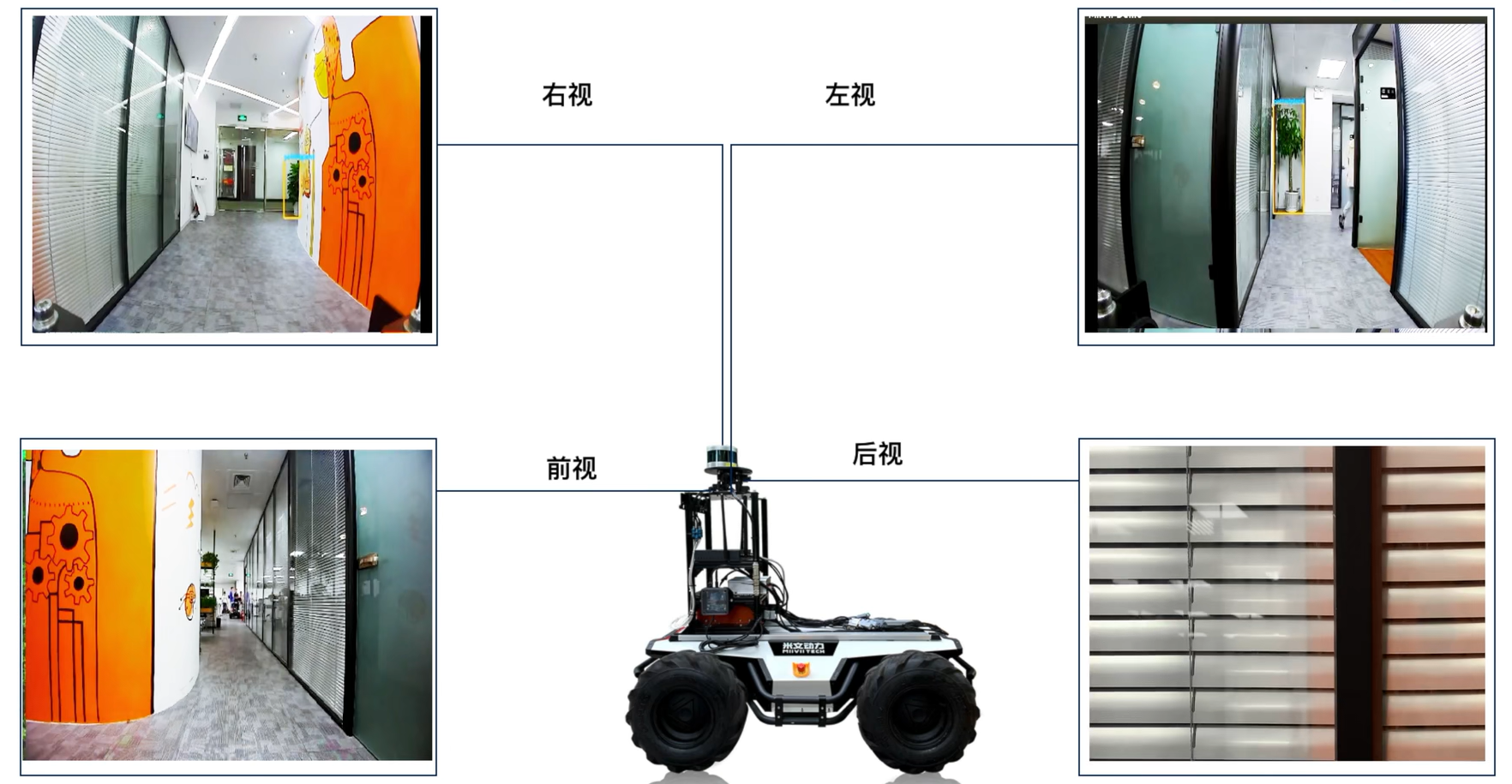
通过Lidar激光雷达、Camera相机等的传感器来进行道路环境感知,生成的点云数据和2D图像数据能为车辆决策系统提供更可靠的数据依据。
内置应用案例,详细开发文档
Auto kit为您提供内置应用案例和详细的开发文档,让您轻松上手ROS开发。从入门到进阶,我们提供完善的教程和示例代码,让您深入了解机器人运动控制、通讯、导航、地图构建等应用。
技术参数
松灵机器人+米文动力低速自动驾驶开发套件

