松灵机器人公众号 2022-10-23 19:26:24
松灵学术 | 在线定位和彩色网格重建架构在移动机器人探索任务中的三维视觉反馈

原文作者:Quentin Serdel, Christophe Grand, Julien Marzat和Julien Moras
原文标题:【Online Localisation and Colored Mesh Reconstruction Architecture for 3D Visual Feedback in Robotic Exploration Missions 】
原文链接:【https://arxiv.org/abs/2207.10489】
设备提供商:松灵机器人-四轮差速移动底盘Scout 2.0#移动机器人底盘
引言
随着机器人技术的不断发展,其在各种探索任务中的应用也日益广泛。为了提高机器人的自主性和决策能力,如何准确地获取和处理三维视觉信息成为了研究的重要方向。其中,3D视觉反馈技术为机器人提供了对其周围环境的直观感知,从而使其能够更好地完成任务。近年来,许多研究人员致力于开发高效的在线定位和彩色网格重建架构,以满足机器人在复杂环境中的实时需求。这些方法不仅提高了数据的准确性,还大大增强了机器人对环境的理解和适应性。此外,通过结合多种传感器数据,可以进一步提高系统的鲁棒性和可靠性。本综述将深入探讨上述领域的最新进展和关键技术,旨在为读者提供一个全面、系统的了解,并预测未来可能的研究趋势和方向。
摘要
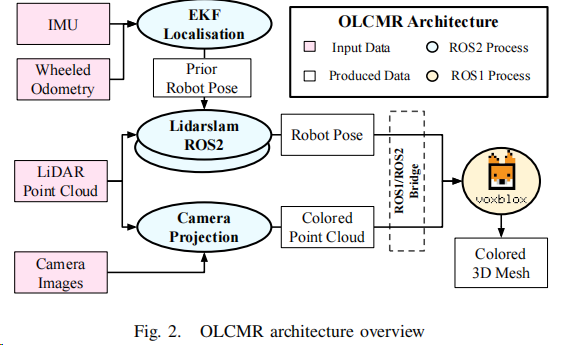
由巴黎萨克雷大学的Quentin Serdel, Christophe Grand, Julien Marzat和Julien Moras提出了一种在线定位和彩色网格重建(OLCMR)ROS感知架构,用于在具有挑战性的未知环境中进行稳健同步定位和SLAM,并实时提供相关的彩色3D网格表示。它旨在供远程操作员在任务期间或之后轻松可视化映射环境,或者作为探索机器人领域进一步研究的开发基础。该架构选择的开源ROS实现组成,包括基于LiDAR的SLAM算法以及使用点云和RGB相机图像投影到3D空间的彩色表面重建过程。整体性能在Newer College利用手持式LiDAR-Vision参考数据集上进行了评估,并在代表性的轮式机器人(松灵机器人Scout 2.0)上分别在城市和乡村户外环境中收集了两个实验轨迹。
论文亮点
提出了一种新的在线定位和彩色网格重建(OLCMR)架构。
该架构使用LiDAR扫描器和多个相机数据进行实时定位和彩色3D网格重建。
在不同的实验环境中进行了测试,并取得了良好的效果。
方法
使用LiDAR-based SLAM算法进行实时定位。
利用点云和RGB相机图像在3D空间中的投影进行彩色表面重建。
实验设计
在Newer College研究人员手持式LiDAR-Vision参考数据集上评估整体性能。
在轮式机器人实验平台上收集的城市和乡村户外环境(松灵机器人Scout2.0)中进行两个实验轨迹。

_59134.png)
_59134.png)
_59134.png)
_59134.png)
_59134.png)
_59134.png)
_59135.png)
_59135.png)
_59135.png)
_59135.png)
_59135.png)
_59135.png)
关于松灵机器人
松灵机器人成立于2016,是一家领先的移动机器人底盘制造商和无人系统解决方案提供商。公司拥有自主研发多模态轮式和履带式线控底盘技术,并获得多项国际认证。松灵机器人为用户提供自动驾驶、移动抓取和导航定位等自研创新应用解决方案,助力不同行业的用户实现自动化。同时,松灵机器人还推出与机器学习、具身智能、视觉算法等相关的科研教育软硬件产品,并与科研教育机构深度合作,推动机器人技术教学与创新。